 0o1337, CC BY-SA 4.0, via Wikimedia Commons
0o1337, CC BY-SA 4.0, via Wikimedia Commons
{kind=link}
History of CAN:
People who have studied PIC or 8051 microcontrollers are familiar with RS-232 connectivity. What percentage of you are aware of it? Have you heard about RS-232 PORT or COM port? RS232 is familiar to anyone familiar with embedded systems or simple devices that interface with PCs. There isn't an issue if you don't know. I'll explain.
Parallel Communication
Computer networks can communicate data in two different ways. The first is parallel communication, which uses eight data lines to exchange eight bits; sixteen data lines are used to transfer sixteen bits at a time. Thus, the term "parallel communication." If there is a problem with any one of the data lines, it will impact the entire data exchange, making it a hardware-sensitive choice. That is the problem we are facing here.
Synchronous Serial Communication
We have yet another excellent choice for exchanging info. This is known as serial communication, where we send the eight bits bit by bit in a serial fashion rather than all at once. One of them is RS232. We then face yet another difficulty. The magnitude of a single bit in time is unknown to us. We use clock pulses for that. Thus, we exchange one bit with every clock pulse. Therefore, we must synchronize the clock with the receiver before exchanging any bits. After synchronization, we trade bits for every clock pulse. Synchronous serial communication is the term for this.
Asynchronous Serial Communication
This communication technique, known as asynchronous serial communication, is enhanced by eliminating the clock needed for exchange. Today, parallel communication is no longer relevant. They may have been utilized in outdated printers and CPUs. Everything turns into a serial now. Tx, Rx, and Ground are the three wires that are sufficient for serial communication. In asynchronous serial communication, the transmitter uses a signal known as the start of frame (SOF) to alert the receiver that it is about to send something. The receiver is prepared for reception when it detects the bus jerk, which indicates that something is about to happen in the serial bus. The baud rate is the only additional parameter that significantly affects the asynchronous serial bus. It specifies a single bit's size in time. A successful exchange requires that the baudrates of the transmitter and receiver coincide. To comprehend the data being transferred, the receiver will take a sample of the incoming encoded physical signal at the specified baudrate. We send a second signal known as end of frame (EOF) to terminate the data exchange when it is complete. Data is exchanged via serial communication utilizing the packet paradigm. However, a packet of SCI or RS232 can only contain one byte (8 bits).
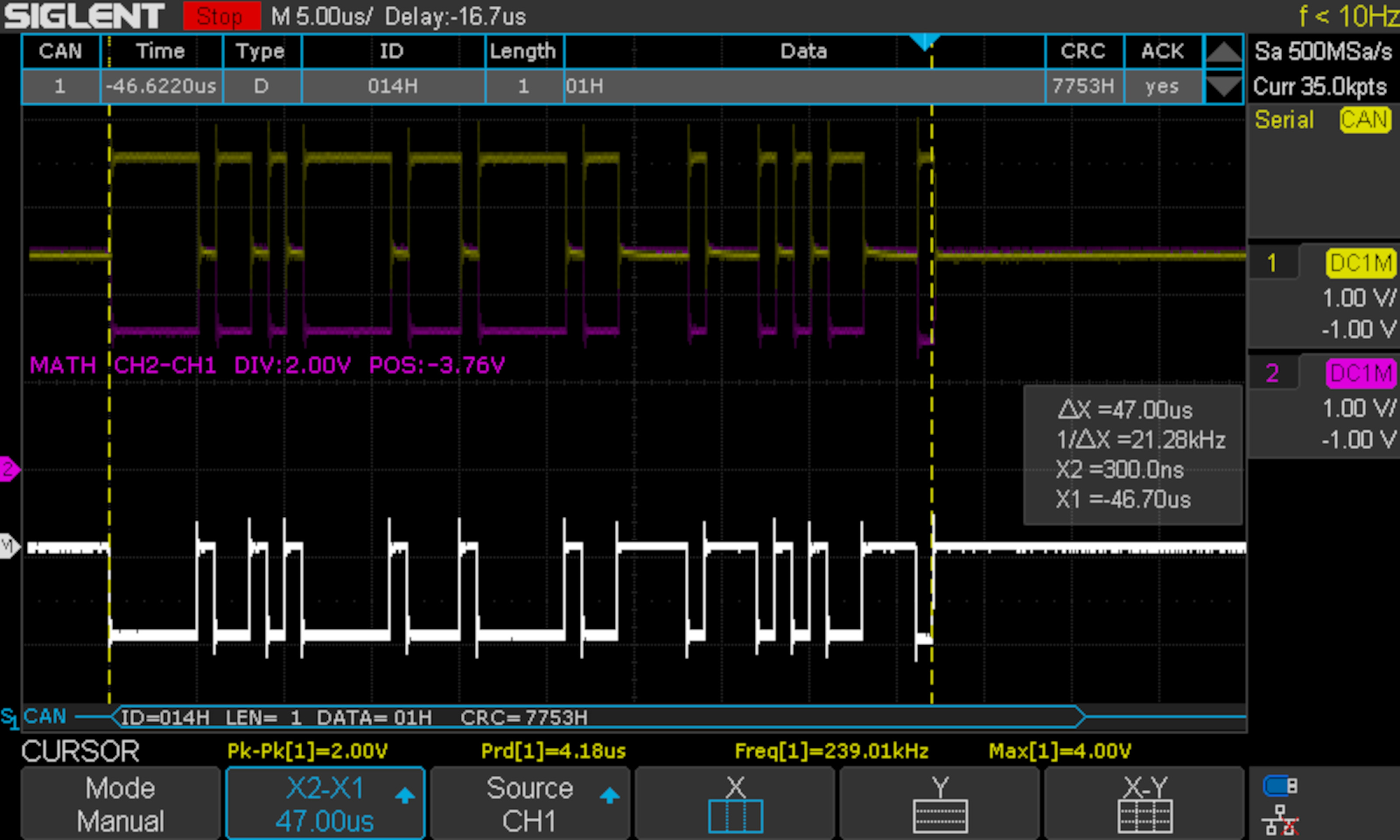
CAN Communication
People began looking for improvement as a result. Consequently, "The CAN communication" was obtained, which has the ability to exchange 8 bytes (64 bits) in a packet. Therefore, we send a greater amount of bits via CAN packet than SCI packet. Apart from that, CAN is an asynchronous serial communication standard that adheres to all of the previously discussed principles. Arbitration and error handling are not concepts in SCI.
In our daily lives, we use a lot of serial interfaces. Serial devices include printers, devices that transfer data from our mobile devices to our PCs, devices that communicate measurements from intelligent instruments to PCs, and devices that flash microcontrollers.